Showing
- doc/header.html 56 additions, 0 deletionsdoc/header.html
- doc/pictures/Concept-Software-Fig.png 0 additions, 0 deletionsdoc/pictures/Concept-Software-Fig.png
- doc/pictures/entity.png 0 additions, 0 deletionsdoc/pictures/entity.png
- doc/pictures/entity.svg 1 addition, 1 deletiondoc/pictures/entity.svg
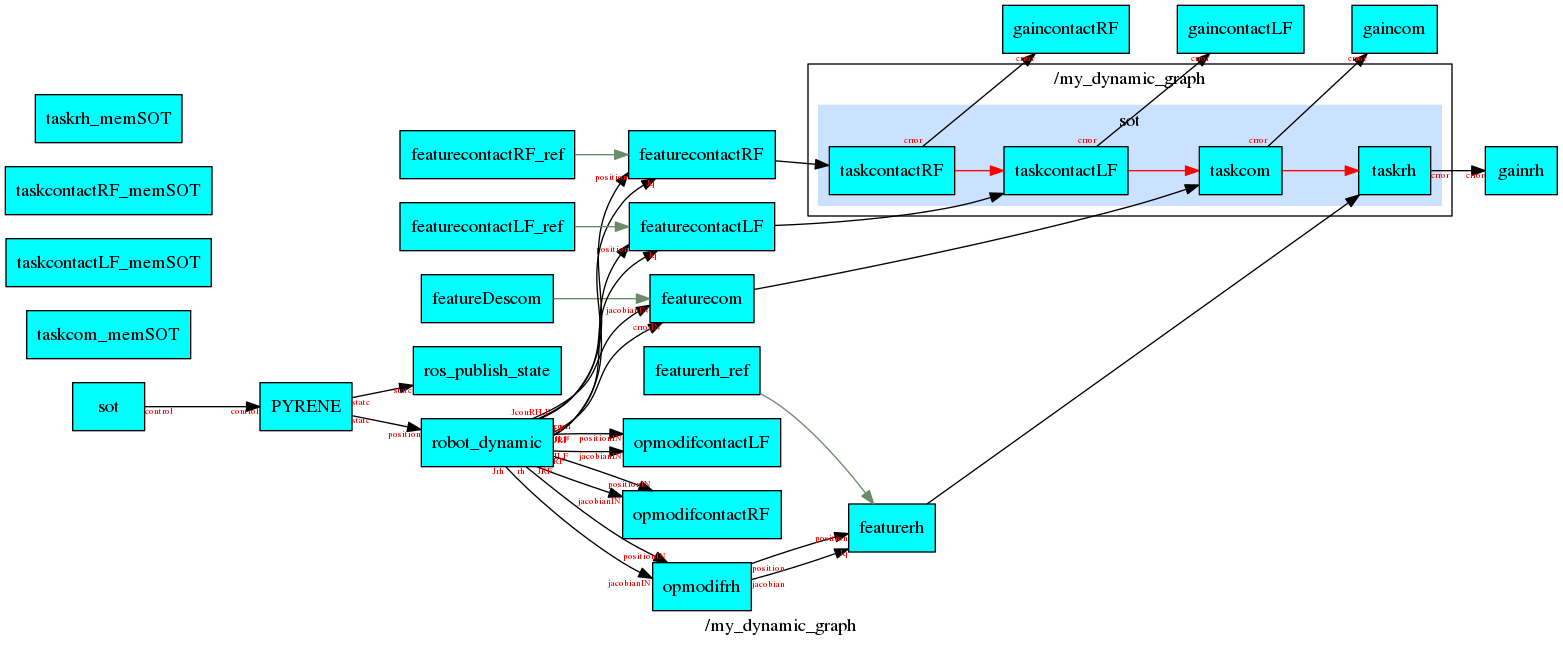
- doc/pictures/my_dynamic_graph.png 0 additions, 0 deletionsdoc/pictures/my_dynamic_graph.png
- doc/pictures/sot.ico 0 additions, 0 deletionsdoc/pictures/sot.ico
- doc/pictures/sot.png 0 additions, 0 deletionsdoc/pictures/sot.png
- doc/pictures/use-case.png 0 additions, 0 deletionsdoc/pictures/use-case.png
- include/CMakeLists.txt 0 additions, 101 deletionsinclude/CMakeLists.txt
- include/dynamic-graph/all-commands.h 3 additions, 15 deletionsinclude/dynamic-graph/all-commands.h
- include/dynamic-graph/all-signals.h 5 additions, 17 deletionsinclude/dynamic-graph/all-signals.h
- include/dynamic-graph/command-bind.h 897 additions, 463 deletionsinclude/dynamic-graph/command-bind.h
- include/dynamic-graph/command-direct-getter.h 29 additions, 43 deletionsinclude/dynamic-graph/command-direct-getter.h
- include/dynamic-graph/command-direct-setter.h 40 additions, 54 deletionsinclude/dynamic-graph/command-direct-setter.h
- include/dynamic-graph/command-getter.h 48 additions, 61 deletionsinclude/dynamic-graph/command-getter.h
- include/dynamic-graph/command-getter.t.cpp 18 additions, 30 deletionsinclude/dynamic-graph/command-getter.t.cpp
- include/dynamic-graph/command-setter.h 48 additions, 61 deletionsinclude/dynamic-graph/command-setter.h
- include/dynamic-graph/command-setter.t.cpp 283 additions, 323 deletionsinclude/dynamic-graph/command-setter.t.cpp
- include/dynamic-graph/command.h 59 additions, 65 deletionsinclude/dynamic-graph/command.h
- include/dynamic-graph/contiifstream.h 0 additions, 71 deletionsinclude/dynamic-graph/contiifstream.h
doc/header.html
0 → 100644
doc/pictures/Concept-Software-Fig.png
0 → 100644
{kind=link}

30.9 KiB
{kind=link}
{kind=link}
doc/pictures/my_dynamic_graph.png
0 → 100644
{kind=link}
97.1 KiB
doc/pictures/sot.ico
0 → 100644

4.98 KiB
doc/pictures/sot.png
0 → 100644
{kind=link}

2.78 KiB
{kind=link}
include/CMakeLists.txt
deleted
100644 → 0